
Autonomous vehicles have made significant advancements over the last generation, but at least one major limitation remains for most—the ability to reliably travel off-road, which encompasses the majority of Earth’s terrain.
Using a combination of advanced computer simulation capabilities and a newly acquired 50-acre off-road test track, researchers at Mississippi State’s Center for Advanced Vehicular Systems are at the forefront of creating and testing the systems that will open a new world of possibility for autonomous vehicles. The advancements developed at MSU could have applications for the military, as well as industries such as agriculture, energy, construction and forestry.
Clay Walden, executive director of the center, said Mississippi State’s decades of automotive research experience, unrivaled high-performance computing capability, and the university’s rural surroundings combine to make an ideal setting for autonomous vehicle development and testing.
“I don’t think there’s anywhere else with our advanced computing capabilities, which we can use to model and simulate the sensors these systems run on, combined with the ability to quickly validate what’s happening,” Walden said. “It’s a great combination of virtual and physical testing in an off-road environment, and I think it gives our partners in the Department of Defense something unique.”
This fall, CAVS put the finishing touches on the MSU Proving Ground, 50 acres of diverse terrain adjacent to the research center. The property contains swampy areas, flats, steep inclines and tall grass, all of which can be used to test vehicles in a variety of environments.
-

CAVS has acquired three vehicles to facilitate off-road autonomy research with a focus on military applications. These vehicles can be used to carry personnel, supplies or surveil an environment.
-
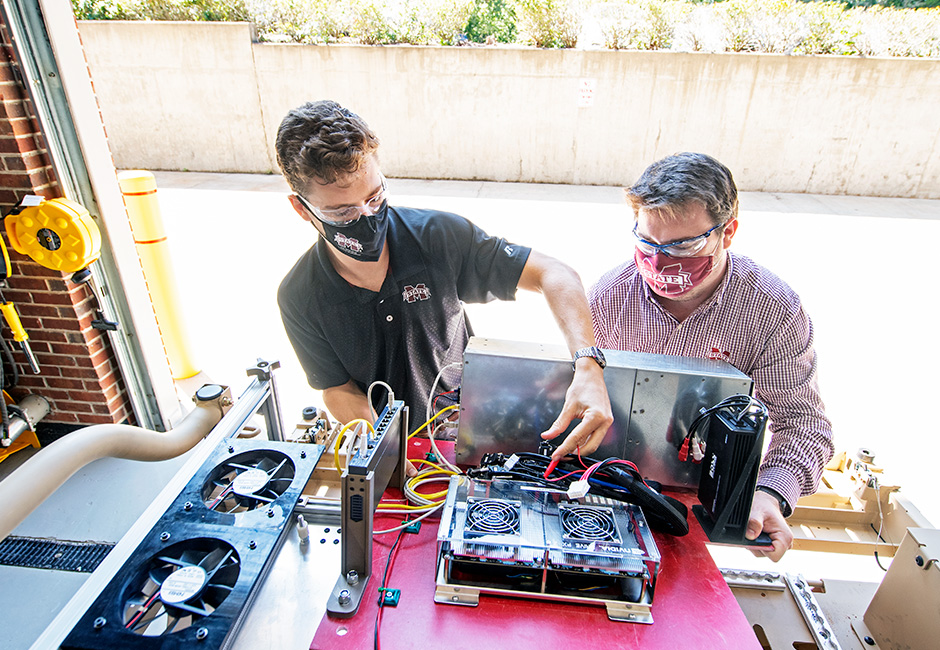
Mechanical engineering senior Christian Johannemann, a Florida native, and CAVS research engineer Tyler Hannis adjust hardware used by the autonomous vehicles to collect data.
-

Marc Moore, left, and Payton Ray, both computer science graduate students, prepare a Warthog ground vehicle drone with sophisticated hardware and software to gain insights into how the vehicle performs in off-road environments.
-

The Warthog is an amphibious ground vehicle that can navigate the Proving Ground’s diverse terrain, which includes natural vegetation growth, hills, swampy areas, and trails.
The Proving Ground will increase the center’s ability to carry out U.S. Army ground vehicle research. Last fall, CAVS received $3.08 million from the U.S. Army Engineer Research and Development Center, headquartered in Vicksburg, to conduct research in areas such as human performance in manned and autonomous systems, soil-terrain interaction, remote sensing capabilities, and more. The work will help the Army assess manned and unmanned tactical vehicles.
As part of the research, CAVS has acquired two new vehicles, with a third on the way. The first to arrive was a Polaris MRZR, a lightweight versatile vehicle that can carry up to four people and has uses in a wide range of tactical environments. The second was a Warthog amphibious, unmanned ground vehicle, which can be used to carry supplies in support of a mission. The third vehicle, an amphibious tracked vehicle operated by a joystick, is scheduled to arrive in late 2020 or early 2021.
Daniel Carruth, CAVS associate director for advanced vehicle systems, said the different vehicles will help the researchers train algorithms and sensors to adapt to different environments and uses.
“The military is looking at vehicle support in a lot of different ways,” Carruth said. “You could have scenarios where you drive for a distance, then get out and walk the last mile to the combat zone and you can call the vehicle to pick you up in a hurry. They envision vehicles that can do reconnaissance and overwatch, and then extraction. So, essentially, vehicles that can protect themselves and then come get you when you needed.”
Another benefit for the armed forces is that self-driving vehicles free up personnel for other aspects of the mission. It could also reduce the number of people needed to handle transportation and supply chain logistics, which often are a dangerous part of a mission.
“If you have three people in a vehicle and you can take out the driving aspect, they can focus on things like security, management, communications with other vehicles or the forward operating base,” Carruth said. “If you can reduce persons in a vehicle, it reduces potential casualties.”
THE IMPORTANCE OF SIMULATION
In addition to the physical 50-acre site, CAVS is creating a “digital twin” of the Proving Ground for simulations. This will allow researchers to use the physical data collected at the test track to train the systems and sensors that the autonomous vehicles use to navigate the terrain.
This process involves collecting information about the property’s soil, topography, trees, plants and more so the digital twin replicates the real thing as closely as possible. The researchers noted that the quality of the data going into any algorithm or simulation plays a significant role in determining the capabilities of the artificial intelligence systems that will use those algorithms to make decisions. The team developed the MSU Autonomous Vehicle Simulator, or MAVS, to conduct in-house testing of navigation software in virtual environments.
To make decisions with 95% confidence, an autonomous driving system needs billions of miles worth of training. That is where the capabilities of MSU’s High Performance Computing Collaboratory come in.
While CAVS researchers are preparing vehicles to drive on the Proving Ground, they can also use the machine learning capabilities of one of the world’s most powerful supercomputers to help prepare the vehicles to drive in unknown environments. By running thousands of simultaneous drive simulations, the research team can gain valuable insights into how the autonomous systems respond to different changes in the environment.
“In a matter of months, you could have one of our vehicles driving most of the trails on the Proving Ground,” Carruth said. “But if I took that vehicle to another property, it’s not going to be able to drive at all. The modeling and simulation tools will let us train that vehicle to drive in the desert or in the mountains. In the simulation, we can put it in any imaginable environment and see how the vehicle performs there.
“On the high-performance computing system, we can simulate 100,000 rides in an environment, which could tell us, for example, what level of rainfall makes a system fail,” he continued. “It lets us build environments and run lots of different trials with different variables to see how those variables affect the vehicles.”
Carruth is leading efforts with NATO, through its Science and Technology Organization working groups, to examine and compare current autonomous modeling and simulation tools. He is leading a NATO competition that will benchmark currently available simulation tools and test them in physical environments, some of which could potentially be done on the Proving Ground. The NATO research group is working through 2023 to determine standards for autonomous modeling and simulation tools.
“With agriculture, forestry and other fields, there are opportunities for ground vehicle coordination with unmanned aerial vehicles,” Walden said. “That gives you perspectives from the ground and from the air.” ~ Clay Walden
LETTING STUDENTS GET HANDS-ON EXPERIENCE
CAVS regularly involves undergraduate and graduate students in the wide-ranging research at the center. Computer science graduate students Payton Ray and Marc Moore are among the first to get to carry out research on the Proving Ground and the new vehicles being used for the project.
Ray, from Olive Branch, studied computer science and linguistics as an undergraduate at MSU. In graduate school, she is focusing on artificial intelligence and how humans interact with computers and robots. At CAVS, she is outfitting the Warthog robot with sensors that collect data from the Proving Ground. That data then informs how the vehicles react in the simulation software.
“My background is mainly in software, but for this you have to be a mini expert in all of it,” Ray said. “You have hardware with the sensors, then you have to get out there and actually collect the data. There are a lot of problems to solve, but it’s a lot more fun than sitting in a cubicle.”
Moore, who came to Mississippi from San Diego before enrolling at MSU as an undergraduate, is doing similar work for the MRZR. He said it is exciting to work in off-road autonomy, where every problem is still “in its infancy.” In addition to getting to work alongside world-class researchers, Moore said he enjoys the opportunity to work with top-of-the-line equipment.
“Lidar systems are not cheap at all, but right now they are the cornerstone of autonomous driving,” Moore said. “We have access to lidar systems. We can test new algorithms. We can gather data. That’s a practical level of experience that very few research institutions provide. The skills we’re learning will be relevant for a long time.”
STAYING AT THE FOREFRONT
Walden said he can envision collaborations with MSU faculty in agriculture and forestry that utilize the Proving Ground. Because MSU is a national leader in unmanned aerial systems research, CAVS will also be well-positioned to explore unmanned ground and air vehicle interactions in an off-road environment.
“With agriculture, forestry and other fields, there are opportunities for ground vehicle coordination with unmanned aerial vehicles,” Walden said. “That gives you perspectives from the ground and from the air.”
The work at CAVS also opens up the opportunity for research into autonomous cars that handle both on- and off-road environments. Additionally, the research could overlap in areas that are beneficial to on-road autonomy.
“The Army is not going to want an autonomous vehicle that is either on-road or off-road,” Carruth said. “At some point, you need a vehicle that is capable of doing both. It would have to recognize the context it is operating in. We’re potentially interested in that transition from on-road to off-road operations and how you build a system that can recognize the context change and operate equally well in both environments.”
By James Carskadon | Photos by Beth Wynn